flowchart TB
FM["Flow Matching<br/>(Baseline)"]
MF["MeanFlow (2025)"]
TM["Transition Matching (2025)"]
TVM["Terminal Velocity Matching (2025)"]
DM["Drifting Models (2026)"]
FM --> MF
FM --> TM
FM --> TVM
MF --> DM
TVM --> DM
One-Step Generation: The Frontier of Single-Step Generative Models
Overview
Diffusion Models and Flow Matching (Lipman et al. 2023) have achieved high-quality image generation, but they carry a fundamental limitation: inference requires tens to hundreds of iterative computation steps. This computational cost has made real-time applications and deployment on edge devices difficult.
From 2025 to 2026, methods that achieve high-quality generation in a single step (1-NFE, Number of Function Evaluations) have been rapidly advancing. This series curates four papers (Geng et al. 2025; Shaul et al. 2025; Zhou et al. 2025; Deng et al. 2026) driving this field in chronological order, tracing the technical evolution from extensions of Flow Matching to entirely new paradigms.
Common themes:
- Eliminating dependence on distillation and pretrained models, enabling training from scratch
- Formulations accompanied by theoretical guarantees (e.g., upper bounds on Wasserstein distance)
- Quantitative evaluation via Fréchet Inception Distance (FID) scores on ImageNet 256x256
Overview of Methods
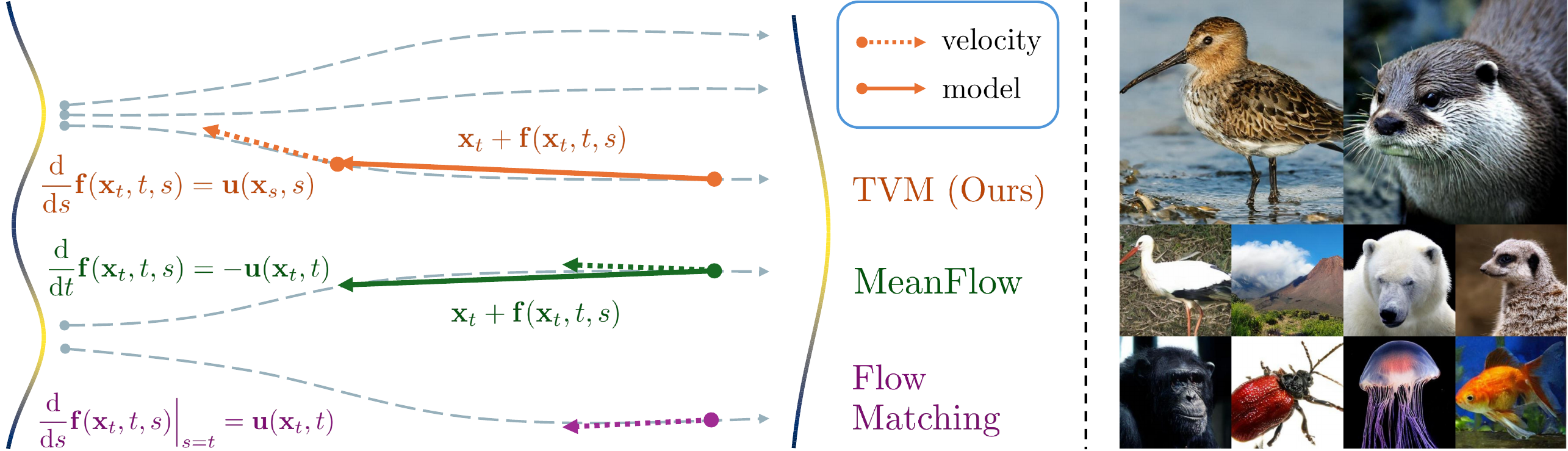
Figure 1 visualizes how MeanFlow and TVM both generalize Flow Matching’s displacement map but apply differentiation in opposite time directions. The lineage of methods covered in this book proceeds as follows: Flow Matching is the baseline; MeanFlow (May 2025) and TVM (November 2025) build on it from opposite differentiation directions; Transition Matching (June 2025) develops a discrete-time Markov reformulation; and Drifting Models (February 2026) abandons the framework entirely by moving iteration from inference to training. Figure 2 summarizes this lineage.
Positioning of Each Paper
1. MeanFlow (May 2025)
While Flow Matching learns an “instantaneous velocity,” MeanFlow (Geng et al. 2025) introduces a new quantity: the “average velocity.” The average velocity is displacement divided by a time interval, enabling direct sample generation in a single step.
Core idea: An identity called the MeanFlow Identity connects the relationship between the average velocity and the instantaneous velocity. This relationship enables training without explicitly computing integrals.
Results: Achieved FID 3.43 (1-NFE) on ImageNet 256x256. This was the best performance at the time for training from scratch without distillation or pretraining.
→ Details: MeanFlow
2. Transition Matching (June 2025)
Transition Matching (Shaul et al. 2025) is a framework that unifies diffusion models, Flow Matching, and autoregressive models as discrete-time Markov transitions. It proposes three variants (DTM (Difference Transition Matching), ARTM (Autoregressive TM), FHTM (Full History TM)), each exploring a different design space.
Core idea: The generative process is formulated as a sequence of stochastic transition kernels, with each transition matched independently. This enables flexible designs that differ from deterministic Flow Matching.
Results: DTM achieves a 7x speedup over Flow Matching (128 to 16 forward passes) while surpassing it in image quality and prompt alignment. FHTM is the first fully causal model to outperform Flow Matching.
→ Details: Transition Matching
3. Terminal Velocity Matching (November 2025)
This method (Zhou et al. 2025) generalizes Flow Matching by regularizing the velocity field at the terminal time of trajectories. While MeanFlow differentiates with respect to the start time, TVM differentiates with respect to the terminal time, obtaining stronger theoretical guarantees.
Core idea: By imposing a differential condition at the terminal time of the displacement map, an explicit upper bound on the 2-Wasserstein distance is derived. In practice, architectural modifications to ensure Lipschitz continuity (RMSNorm, QK-normalization) are key.
Results: Achieved FID 3.29 (1-NFE) and FID 1.99 (4-NFE) on ImageNet 256x256. At 4-NFE, it surpassed the performance of 500-NFE diffusion models.
→ Details: Terminal Velocity Matching
4. Generative Modeling via Drifting (February 2026)
An entirely new paradigm by Kaiming He et al. (Deng et al. 2026). While conventional methods perform iterative “pushforward” at inference time, Drifting Models evolve the pushforward distribution during training. At inference time, only a single forward pass is required.
Core idea: A vector field called the “Drifting Field” attracts generated samples toward the data distribution while repelling them from other generated samples. Through anti-symmetry, the distribution naturally reaches equilibrium when it matches the target.
Results: Achieved FID 1.54 (latent space) / FID 1.61 (pixel space) on ImageNet 256x256. This established a new state of the art (SOTA) for 1-NFE generation.
→ Details: Drifting Models
Performance Comparison
| Method | Date | 1-NFE FID | 4-NFE FID | No Distillation | Key Feature |
|---|---|---|---|---|---|
| Diffusion Transformer (DiT) (FM) | 2023 | - | - | - | Baseline (250-NFE: 2.27) |
| MeanFlow | 2025-05 | 3.43 | - | Yes | Average velocity, from-scratch training |
| TVM | 2025-11 | 3.29 | 1.99 | Yes | Terminal regularization, W2 upper bound |
| Drifting | 2026-02 | 1.54 | - | Yes | New paradigm, distribution evolution during training |
Technical Background
Flow Matching Basics
Flow Matching learns a continuous transformation from a noise distribution \(p_0\) to a data distribution \(p_1\). A velocity field \(v(z_t, t)\) at time \(t \in [0, 1]\) is approximated by a neural network, and sampling is performed by solving an ordinary differential equation (ODE):
\[ \frac{dz_t}{dt} = v_\theta(z_t, t) \]
At sampling time, starting from \(z_1 \sim p_1\) (noise), the ODE is solved in the reverse direction to obtain \(z_0\) (data). More steps yield higher accuracy, but at greater computational cost.
Challenges of One-Step Generation
One-step generation is equivalent to approximating the entire ODE trajectory with a single neural network evaluation. This inherently involves the following challenges:
- Trajectory curvature: Non-linear trajectories are difficult to approximate in one step
- Mode collapse: Maintaining diversity while preserving high quality is challenging
- Consistency: Consistency across different scales must be guaranteed
Each paper in this series addresses these challenges with its own unique approach.
Future Prospects
The rapid evolution of one-step generative models suggests the following directions:
- Real-time applications: Extension to video generation and interactive image editing
- Robotics: Drifting Models have already demonstrated effectiveness as an alternative to Diffusion Policy
- Multimodal integration: Transition Matching’s FHTM enables integration with LLM architectures
- Theoretical understanding: A unified understanding of the theoretical relationships among these methods
References
Deng, Mingyang, He Li, Tianhong Li, Yilun Du, and Kaiming He. 2026. “Generative Modeling via Drifting.” arXiv Preprint arXiv:2602.04770. https://lambertae.github.io/projects/drifting/.
Geng, Zhengyang, Mingyang Deng, Xingjian Bai, J. Zico Kolter, and Kaiming He. 2025. “Mean Flows for One-Step Generative Modeling.” arXiv Preprint arXiv:2505.13447. https://arxiv.org/abs/2505.13447.
Lipman, Yaron, Ricky T. Q. Chen, Heli Ben-Hamu, Maximilian Nickel, and Matt Le. 2023. “Flow Matching for Generative Modeling.” International Conference on Learning Representations. https://openreview.net/forum?id=PqvMRDCJT9t.
Shaul, Neta, Uriel Singer, Itai Gat, and Yaron Lipman. 2025. “Transition Matching: Scalable and Flexible Generative Modeling.” arXiv Preprint arXiv:2506.23589. https://arxiv.org/abs/2506.23589.
Zhou, Linqi, Mathias Parger, Ayaan Haque, and Jiaming Song. 2025. “Terminal Velocity Matching.” arXiv Preprint arXiv:2511.19797. https://arxiv.org/abs/2511.19797.